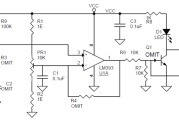
这里介绍的项目是一个模拟电容式接近传感器。该电路来自德州仪器 (TI 应用笔记。大多数传统电容式接近传感器产生“1”或“0”输出,该电路产生直流输出,...
组合机器人的超声波防撞电路设计 - 机器人技术电路设计图集锦
接线图
2023年02月01日 21:10 197
admin
TOP4 配套Lego组合机器人的超声波防撞电路设计
地面灰度传感器电路设计
如图所示,地面灰度传感器通过发光二极管LED照亮地面,地面的反射光线被光敏三极管接收,当地面颜色为黑色时,反射的光线比较弱,则光敏三极管的基极电流越小,集电极电流也相应较小,1端口电压值较高,其测量值较大;反之当地面为白色时,反射的光线较强,集电极电流越大,1端口电压值较小,测量值也较小。

本文研究并设计了基于ARM9嵌入式系统的一种智能灭火机器人,具有以下5个创新点:(1)采用了嵌入式系统内核,大大提高了机器人处理信号的能力;(2) 双电源供电系统引入,使机器人的运行更加稳定可靠;(3) 采用PWM信号控制大功率直流电机,在速度和精度方面有了很大的改进;(4)通过合理选择PSD测距传感器的个数和安放位置,既满足比赛要求,又能节约成本;(5)本文设计的远红外火焰传感器组,很好地完成了对火源的精确定位任务,提高了灭火可靠性和快速性。实测证明,本文设计的机器人能够很好地完成比赛任务,并且在可靠性和速度方面都有了大幅度的提高,具有很强的应用价值。
机器人的超声波防撞电路设计
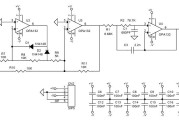
这种探测器的依据是超声波具有很强的方向性。发送的传感器发出连续信号。在这个装置之前约几米的适当物体可以把相当强的信号反射回到接收传感器。发送和接收传感器只相隔大约50毫米,所以方向性强的超声波保证从发射器到接收器之间的直接耦合波显得微不足道。这个电路从RCX装置获得电源,它就和一种标准Lego探测器一样连接到RCX装置的一个输入端口。并没有特别支持采用RCX代码或者 Mindstorms套件通常共用的其他编程语言的超声波探测器。因此,可以利用软件以标准有源探测器。例如Lego光探测器的相同基本方式操纵它。
图中是超声波探测器的整个电路图。二极管列阵由D1至D6组成,而标准的桥式整流器则由D1至D4组成。这个整流器连同滤波电容C3产生7伏特电源。桥式整流器提供全波整流,所以电路怎样连接RCX装置都没有关系。

RCX装置内部的上拉电阻通常使输入端子处于高电位。D5和D6使IC1a的输出把RCX端口输入端拉低至0伏电压。这个装置怎样连接RCX装置也是没有关系的。IC1a的输出通过两个二极管的任何一个连接端口的带电输入端。在输入提供电源的时间内,两个二极管的其中一个就会阻断电源,因此只有极小电流流过两个二极管。在这些时间内,lC1a的输出连接电源,但R1却阻止过量的输出电流流入IC1a的输出级。
IC1a是缓冲放大器,它是普通的电压跟随级。IC1b是直流放大器。它以同相模式操作,反馈电阻R2和R3把它的闭环电压增益调整倒3.7。要注意,lC1采用的LM358N是用在没有负电源的直流电路的。其他大多数运算放大器并不能提供这里要求的很低输出电压,所以不建议使用代用器件。TR1放大接收传感器Mic1的输出。 TR1用简单的共射极放大器,它提供超过40dB的电压增益。C2将其输出耦合到D7和D8组成的半波整流器电路。C1和 R4组成平滑滤波电路。发射器电路只是采用标准震荡配置的555时基电路(IC2)。RCX装置可以从每个输入端提供的最大电源电流是相当有限的,所以 IC2最好采用低电源的 555。否则就会出现负载太大的风险以致获得不合适的电源电压。VR1是频率控制器,通常调节它而使电路产生最佳性能。不过,如果需要降低灵敏度,可以故意使它偏离最佳频率。
AT89S51 的编程方式可分为并行及串行模式。由于目前PC台式及及笔记本已经逐渐取消并口,因此并口编程器已经逐渐被淘汰。采用USB接口的ISP编程器比较适合实验之用。本书所附赠的电路就是以USB ISP串行模式来对AT89S51进行编程的,其电路如图所示。图为AT89S51 USB ISP编程器电路图:

USB编程器电路设计
CH341A是一个USB总线转接芯片,通过USB总线提供异步串口、打印口、并口,以及常用的2线和4线等同步串行接口。CH341A采用 SOP-28无铅封装,具体功能由复位后的功能配置决定,同一引脚在不同功能下的定义可能不同。CH341芯片正常工作时需要外部向XI引脚提供 12MHz的时钟信号。一般情况下,时钟信号由CH341内置的反相器通过晶体稳频振荡产生,外围电路只需在XI和XO引脚之间连接一个12MHz晶体,并为XI和XO引脚对地连接振荡电容。CH341芯片支持5V电源电压或者3.3V电源电压。当使用5V工作电压时,CH341芯片的VCC引脚输入外部 5V电源,第9脚(V3引脚)应该外接容量为4700pF或者0.01uF的电源退耦电容。CH341 第10、11脚连接到USB数据总线。第13、14脚外接12MHz晶体,为芯片提供时钟。第16、18、20、22脚分别接300Ω的限流电阻,作为 RST、SCK、MOSI、MISO信号输入/输出。在使用CH341A的USB转ISP功能时,第23脚必须接地。第28为电源5V输入,接退耦电容,可使让芯片工作更稳定。

图3.12 USB编程器电路图
在图3.12里,USB1为与电脑连接的USB插座。此USB插座共有4个脚,分别为+5V、D-、D+及GND。+5V及GND是本电路板的电源来源。R3为限流电阻,此电阻的取值需要根据实际情况确定。在使用此电阻时,应保证后端的CH341A及AT89S51芯片供电电压大于4.5V。在保证接入的元件接线正确及电路整体消耗电流小于500mA的情况下,此电阻可以不接,直接用短线连接即可。CH341A芯片通过USB接口和USB连接线完成与电脑的数据传输。
相关文章



发表评论