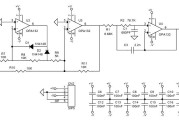
这里介绍的项目是一个模拟电容式接近传感器。该电路来自德州仪器 (TI 应用笔记。大多数传统电容式接近传感器产生“1”或“0”输出,该电路产生直流输出,...
小车的循线部分电路 - 循线机器人小车系统电路模块设计
接线图
2023年09月27日 21:05 101
admin
小车采用4轮驱动,左右各2个12V直流减速电机,通过L298N来进行驱动。L298N的输入分别接STC89C52RC单片机的P1.4、P1.5、 P1.6、P1.7口。当P1.4、P1.5同时为高电平或者低电平时电机B1、B3停转,即小车左侧车轮停转;当P1.4输出高电平,P1.5输出低电平时,B1、B3正转;当P1.4输出低电平,P1.5输出高电平时,B1、B3反转;当P1.6、P1.7同时为高电平或者低电平时电机B2、B4停转,即小车右侧车轮停转;当P1.6输出高电平,P1.7输出低电平时,B2、B4正转;当P1.6输出低电平,P1.7输出高电平时,B2、B4反转;各电机转速的控制通过PWM技术实现。

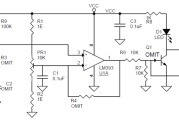
小车采用红外发射对管RPR-220来探测地面线条,RPR-220采集到的信号送LM393进行放大,然后送入单片机STC89C52RC的P1.2和P1.3口。原理图中R13、R14是用于调谐红外发射对管采集信号的灵敏度的。
最后是小车大脑部分的电路原理图:


图中绘制了STC89C52RC的复位电路和晶振部分电路。
循线机器人小车比较简单,不比双足机器人有众多活动部件的控制和设计,循线小车活动部件就只是驱动小车的车轮,控制左右车轮的转速来控制小车前进方向是直行,还是左转弯,或者右转弯,因此可以看出整个控制系统简单。通过简单的循线机器人小车的设计,掌握对电机驱动、传感器信号采集、电源供应、焊接技术、设备采购、系统总体规划等部分有个感性的认识,因为这些部分是将来所有机器人设计中不可回避的基本部分。
相关文章



发表评论