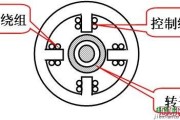
伺服电动机的工作原理及作用伺服电机的作用是驱动控制对象。被控对象的转距和转速受信号电压控制,信号电压的大小和极性改变时,电机的转动速度和方向也跟着变化...
机械臂位置控制的原理和方法
接线图
2023年10月06日 12:48 154
admin
引言:什么是位置控制,位置控制是工控领域中较为常见的一种控制方式,通常用在机械设备的位置移动控制上,如机床和机械臂等,在许多高端的机械设备中,都需要用到位置控制。本文将以机械臂位置控制来进行相关内容的介绍。
机械臂是较为常见的制造机器人类型,类似于人的手臂,它的多个部分都十分类似于人的肩膀、肘部和手腕,可以像人的手臂一样被引导执行各种操作。由于人的肩膀是固定在身体上,相当于机械臂的“肩膀”也是被安装在固定不动的底座上,而机械臂的其余部分则可以向不同的方向移动。
机械臂的位置控制是为了确保机械臂能够没有偏差地到达期望的位置,是机械臂比较重要的功能。机械臂的关节通常都是由电机进行驱动,操作者可以通过计算机控制关节中的电机来控制机械臂。由于电机通过控制增量来移动,因此可以使机械臂以十分准确的方法来进行重复移动,具有很高的准确性和可靠性。接下来将为大家简单介绍一下机械臂位置控制的原理,以及机械臂的位置控制方法。

机械臂位置控制
机械臂位置控制的原理
为了控制机械臂的位置,我们需要使用电机随时输出电磁转矩来稳定机械臂的重力矩。在控制机械臂到达指定位置的时候,电机的转速为零,且处在堵转状态,所输出的力矩就是堵转转矩。由于电枢电压的不同,电机的堵转转矩也是不同的,通过改变电枢电压的方法,完全可以实现对电机堵转转矩的控制,从而实现了机械臂的位置控制。
机械臂位置控制的信号流程。首先,对系统的给定值输入需要通过人机交互部分的按钮来完成,其中包括了指定位置和转动方向这两项信息内容,然后由DSP按照输入的指定位置,计算出应加给电机的前馈控制量,并向电机输入PWM信号波和方向信号来驱动电路。同时,电码盘检测出当前的角度,反馈给DSP。之后DSP按照当前位置和指定位置的差值来对其进行PID控制,调整输出的PWM信号波和方向信号。此外,人机交互部分中的液晶显示器来负责实时显示控制过程中的各项信息。
机械臂位置控制的方法
1、前馈加三环控制
这种位置控制方法是在三环反馈控制的基础上,加入了前馈指令值。驱动器通常需要在CSP模式下运行,前馈值的生成方法有两种,一是控制器仍然只发送指令位置给机械臂,驱动器通过差分生成前馈速度值和前馈加速度值;二是控制器不只发送了指令位置,还向驱动器发送了前馈速度偏置值和前馈力矩偏置值。这种方法可以使机械臂具有动态响应能力。

机械臂位置控制
2、三环反馈伺服控制
这种位置控制方法是大家比较熟悉的一种。此时的控制都是在驱动器里完成的,它按照指令位置来生成力矩,使机械臂很好地追踪到指令位置,而控制器只是一个负责向驱动器发送指令位置的轨迹规划器。这种方法在稳定状态时的精度很高,并且抗干扰能力较强,可以保证机械臂的重复定位精度,但其动态性能比较差,例如指令位置曲线与实际位置曲线之间的时间延迟较大。
3、非线性控制
前面两种方法的驱动器都是在位置控制下运行,而这种方法是将驱动器位于力矩或者电流模式下,应用了现代控制理论中的一些非线性控制方法。控制器直接按照指令位置计算出力矩值并发送给驱动器,这时驱动器弱化成了一个功率放大模块,而控制器才可以算是在做运动控制。这其中可以采用的控制方法有计算力矩法、反馈线性化以及一些自适应控制方法等。
浏览以上文章可以了解到机械臂的位置控制可以用前馈加三环控制、三环反馈伺服控制以及非线性控制等方法来得以实现。机械臂的位置控制是为了确保机械臂能够没有偏差地到达期望的位置,也是机械臂比较常用的一种控制方法。机械臂的关节通常都是由电机进行驱动,操作者可以通过计算机控制关节中的电机来控制机械臂,以达到较高精度的运动位移。关注捷众机器人,了解更多有关机械臂位置控制的知识与应用。
相关文章


发表评论