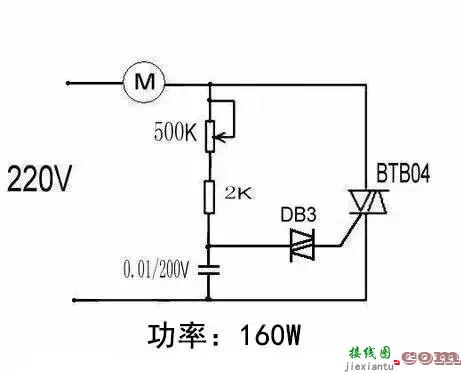
1、可控硅调速电路2、电磁调速电机控制图3、三相四线电度表互感器接线4、能耗制动5、顺序起动,逆序停止6、锅炉水位探测装置7、电机正反转控制电路8、电...
如何选择六自由度运动平台控制方案?
接线图
2023年10月06日 12:47 133
admin
六自由度运动平台
为了保证在运动过程中的稳定性和不发生破坏现象,六自由度平台的六个伺服电动缸必须做到协调一致的动作。考虑到多轴的同步、协调运动、运动机构的实际应用环境以及六自由度并联平台是一种高度耦合的系统,其运动控制相对复杂。
六自由度运动平台的运动控制系统选择有多种形式,根据不同行业的应用,选择不同的运动控制方案和策略。根据具体项目的预算,以及动态响应性能和精度的要求,来选择相应的控制系统及实现方案。
方元明科技主要推荐以下两种控制方案选择:
第一种方案:
考虑到并联六自由度控制策略实施的方便和现代计算机的计算速度、造价等问题。采用工控机(IPC)+多轴运动控制卡的形式。工控机(IPC)+多轴运动控制卡。

多轴运动控制卡是一种总线形式的板卡,它具有良好的开放性、可靠性和抗干扰性,可通过VC、VB等高级控制语言实现其控制功能。在六自由度运动平台系统设计的相关研究中,多轴运动控制卡的应用较多,其价格相对较低,且能够安装在工控机的卡槽上,无须再添加控制器就可以与外部信号处理电路进行通信,这种一体化的设计避免了硬件结构的冗余繁杂。
从软件编程的角度来说,运动控制卡的灵活性较强,只需给用户提供底层驱动和编程代码,用户可根据自己的软件开发能力和个性需求做出各种相应的的界面和功能。

在硬件方面,作为完成控制系统的一个部件,要实现控制功能,还需其他辅助部件,如PC、指令设备、传动装置等。通常运动控制卡需要一个载体,一个基于工控CPU的系统运行平台。除了板卡本身,还需配合工控机、高精度定时时钟和I/O 接口和相应的隔离、差分电路,因此硬件电路的连接和调试过程较为复杂。

在软件方面,通常需要确保工控机上有一个实时进程,来运行实时控制算法,来提高系统的响应速度,避免产生滞后。但这种实时系统能够提供的定时时钟频率较低,不能满足系统要求;而如果首先保证系统的实时性,系统的开放性又会相应地降低,因此这种控制方案存在一定的局限性。

六自由度运动平台的控制采用计算机集中控制方式,由一台IPC完成各电动伺服缸位置指令值的计算,并对并联六自由度平台的六根电动缸位移和速度进行监控。多轴运动控制卡通过PCI插槽与PC机相连接,并完成6个电动伺服缸的位移闭环控制,因采控制系统的改变比较灵活,只需要重新编程,就可以更换一种算法。因此,可以根据需要在计算机上实现比较复杂的补偿和控制算法。
第二种方案:
随着计算机技术、电子技术和网络通信技术的进步,机器人运动控制技术取得了突破性发展,以太网总线技术在运动控制领域的应用日趋广泛。特别是近年来,随着具有显著开放式特征的运动控制系统与开放式工业以太网总线的技术融合,伺服运动控制系统向可靠性更高、速度更快、精度更高、稳定性更好的方向发展。

考虑到运动平台的结构和配置形式,并结合计算机的控制策略,以及高动态响应的需求,用户需要一种开放式结构的控制系统,通过自行开发的控制软件来完成六自由度运动平台的运动控制要求,因此需要提供强大的运动控制功能作为保障。采用工控机(IPC)或人机界面(HMI)+运动控制器的形式。
运动控制器是一种高度集成化的专用运动专用控制设备。它能够将一些通用的运动控制功能固化在其中,用户可以随时对这些功能块或指令进行组态和调用,这样降低了编程的难度,在提高控制性能的同时,降低了过多附带硬件和功能模块所需的成本。与多轴运动控制卡相比,控制器更偏向于集成化,它应该是一个完整的、独立的硬件平台。但是控制器软件的程序写入,大部分是在控制器内部,利用其自身固有的编程方式写程序,或者靠上位计算机发送控制信号来执行下面的命令。也就是说,控制器大多带有相匹配的控制软件。
PAC控制器是一种融合了传统的PLC和IPC的优点,具有独特理念的模块化控制装置。即嵌入式PC的开放式结构控制系统, 控制器采用带有Inter芯片,是一款强大的CPU,采用嵌入式实时多任务操作系统,任务循环周期最快可达到微秒级别,附加IO处理器,附带接口模块扩展插槽,可移动存储CompactFlash卡,且设备层网络采用实时以太网,可以实现非常高的实时控制。专门应用于循环周期非常短的项目,能够处理大量数据,浮点型运算。
运动控制器是上位机PC端用户到伺服运动机构的桥梁,通过运动控制器的运动控制,将上位机的控制命令、运动规划等在执行机构上实现。采用PAC控制器,用于对高精度调整机构的实时、精确控制。运动控制器通过对六台伺服驱动器进行控制,实现平台的六自由度运动。实现了并联机构的正反解算法,并将其集成到运动控制器中。

采用稳定可靠、通信速率高、受干扰率低、网络速度快为特点的工业以太网搭建运动控制总线网络完成运动控制系统的设计。针对运动控制器需要实现的具体功能以及控制系统的实际构成情况,采用“PAC+工业以太网”技术的设计方案。控制系统采用“上位机+PAC控制器”的控制形式。整个运动控制系统由上位机、PAC控制器、伺服驱动器、电动缸、机械机构、传感器等组成。

上位机软件负责按要求对机构的运动进行轨迹规划,并将各种控制命令通过以太网通讯接口下发给PAC控制器;运动控制器对收到的控制命令进行命令解析、状态获取、机构运动学模型解算算法及控制算法处理等。根据具体命令执行相应操作。运动控制器经过反解算法解算,将上位机发来的位姿信息转换成每个电动缸的位置信息;再根据控制器获取的电机绝对编码器值,以及磁致伸缩位移传感器测得的电动缸伸缩量等信息,应用相应的控制算法,得到具体的控制量;通通过工业以太网总线发送运动控制命令给伺服驱动器,实现并联机构的精确运动。同时,运动控制器可以通过工业以太网获取到各个驱动器的当前状态、运动信息及相关数据,通过正解算法得到机构的实时姿态,并将这些信息通过以太网反馈给上位机。控制系统具体构成如下图所示。

以上是方元明科技为您推荐常见的两种六自由度运动平台控制方案,如果您有更详细的需求,可以联系我们定制六自由度运动平台解决方案。
相关文章


发表评论