西门子S7-1200是一款紧凑型、模块化的PLC,可完成简单逻辑控制、高级逻辑控制、HMI 和网络通信等任务。对于需要网络通信功能和单屏或多屏HMI的...
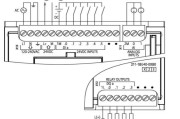
PLC光源机械手上泡控制电路
接线图
2023年05月18日 18:15 318
admin

采用移位寄存器控制法的控制梯形图设计根据被控系统的控制功能流程图,可I越采用移位寄存
器控制法绘制控制梯形图,如图26-5所示。程序中,工步状态采用带掉电保护的HR继电器记忆。所用的
HR继电器:一内部继电器和计时器见表26-2。
梯形图的工作原理做如下说明:
1)在原位状态下,按下启动按钮SBl (0000),
中间继电器1000得电并自锁(保持一个循环周
期),0501得电,封口机开始运行。初始化脉冲
1815闭合,保持继电器HROOO得电,帚开触点闭
合,0505得电,机械手从右下限开始上升。
2)上升到上限时,上升限位开关s04 (0005)
动作,其常开触点闭合,SROOO失电,0505失电,
上升动作结束i同时HRO01得电,0502得电。
3)机械手开始左旋,左旋到左限行程开关
SQ2 (0003)动作,HRO01失电,0502失电,左
旋动作结束;河时HR002得电,0504得电,机械
手开始下降。
4)下降到下限行程开关SQ5 (0006)动作,
HR002失电,0504失电,下降动作结束;同时
HR003得电,0500得电,上泡盘启动。
5)上泡盘上泡壳进入光电开关测量区,光电
开关SQ6 (0007)动作,HR003失电,0500失
电,上泡盘停止;同时HR004得电,0506得电,
机械手开始抓泡。
6)当抓泡限位开关SQl (0002)动作时,
HR004失电,0506失电,抓泡动作结束;同时
HR005得电,0505得电,机械手开始上升。
7)杌械手上升到上限行程开关s04 (0005)
动作.HR005失电,0505失电,上升动作结束;
同时HR006得电,0503得电,机械手开始右旋,
右旋到右限行程开关SQ3 (0004)受压动作,
HR006得电.0503失电,右旋动作结束;同时
HR007得电,0504得电,机械手下降。
8)机械手下降到下限行程开关SQ5 (0006)
受压动作时,HR007失电,0504失电,下降动作
结束;同时HR008得电,0507得电,放泡动作结
束,同时计数器TOO得电,开始计时。
9)定时25到.HR008失电,0507失电,放
泡动作结束;同时HR008得电,机械手复位,一
个工作循环结束。
若设置为连续运行,此时SA (0008)动作,
下一个工作循环开始。上泡盘、封口机随机械手
启动而开始运行,随动作结束而停止。
(4)结论本例的应用表明,用PI.C控制上
泡机械手的运动,可使其工作平稳、准确,更有
利于改善工人的劳动环境,降噪增效,节约能源。尤其当需改变机械手的某些动作时,还可以通过编程器
改变程序,而无需改造其他结构,灵活快捷。如果上泡机械手前后工序的运动都由PLC控制,那么在整条
生产线上,前一道工序的运行状态由后一遒工序的需要决定,各工序间将产生连动,不会出现各工序间的
生产不协调,可减少生产线上操作人员的数量,提高工作效率。
相关文章

发表评论