西门子S7-1200是一款紧凑型、模块化的PLC,可完成简单逻辑控制、高级逻辑控制、HMI 和网络通信等任务。对于需要网络通信功能和单屏或多屏HMI的...
基于现场总线监测的PLC控制系统
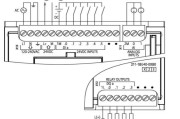
接线图
2023年01月29日 16:39 220
admin
高速通信,它使得通信传感器的输入能够满足需要大量数据通信的智能设备和高速响应的要求。作为一个CC-link的功能,RAS功能是:待机主功能,分离从站功能,这些功能使得在通信故障和系统调试时自动恢复过来。至于测试和监控功能,对确认数据连接状态,硬件测试和电路测试都是可用的。CC-Link网络图如图1所示,其监控系统由主站>从站>“个人电脑”>逆变器>伺服电机>远程I / O单元等。
为了满足自动化和灵活性的要求,许多复杂的制造系统都是由可编程逻辑控制器(PLC)来控制的。这是因为PLC的是适应性强,模块化,便于使用和购买成本低。而真空卷绕镀膜就是这样一个复杂的制造系统。
本文介绍了基于CC-LINK现场总线的智能监控系统,其中包括上位个人电脑和下位用于控制和信息管理的可编程逻辑控制器。这一监控系统中采用了CC-Link现场总线这一新的技术。

2 监测系统的结构
基于现场总线的监控系统有两种功能,包括监测区域的监控和信息管理单元、控制室里的控制单元。位于清盘真空机附近的所有智能监测单位都有微处理器,具有以下功能:各自的信号采样,A / D转换,数据计算等。现场总线是单位从站中离散检测单元和主站之间最重要的连接。模拟信号被数字信号取代以构成双向沟通,以利于操作者在控制室里进行控制、检查和参数设置。这种结构,一方面提高了监测系统的精度和抗干扰能力,另一方面还节约了投资成本。
数字智能监测单元应根据实际需要而定,该系统具有五种监测单位:温度,真空度,轧辊直径,薄膜张力和传输速度。
监测系统能否正常工作取决于传感器的性能是否在要求的水平之上,它们的精度和稳定性对监测系统有直接影响。从这些传感器获取的数据经PLC处理并在HMI人机界面上显示出来,如图2所示。
智能监控模块有两个功能:一方面它的过滤器、放大和调节输出信号的传感器能由PLC(FX系列)处理得到适当值;另一方面,它凭借通信接口的可编程控制器进行数据采集,A / D转换,数据处理,软件抗干扰,计算参数并利用PLC上的通信接口把数据传输到中央控制单元。
中央控制装置(CCU)是该监控系统的中心,它包含了个人电脑和RS232。它的工作状态时控制智能监测的每个单位,将得到的数据和一场信息进行处理,并保存他们。此外,控制器还支持上位用户的计算机访问,而且,它的数据分析是切实可行的,并利用数据管理和故障诊断软件对数据进行诊断。
监测系统采用CC-LINK现场总线构成的模块和双绞线作为通信介质。最多可以把六十四个站连接到这个现场总线上,通讯模块则是通过CC-Link现场总线把监测单元和分站连接起来。当现场总线的通信速率为156kps时传输距离可以达到1.2公里。

3 PLC编程
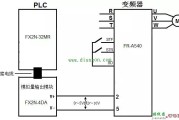
在这个绕组系统中,我们使用三菱A系列PLC作为主站,因为它具有快速反应能力和强大的信息处理能力。它是用来控制总卷绕系统与FX系列的PLC缠绕系统的舒展共存系统的行为的。而系统的操作动作以及动作序列已经由设计人员事先编入控制程序中。控制程序则给绕组系统设置了一系列的操作动作,指导PLC来控制整个系统。所有传感器或执行机构的当前状态都作为输入、输出或者旗语信号存储在PLC内存中。因此,PLC程序是一个PLC控制制造系统监测的基础。
PLC程序采用主程序循环扫描的方法,例如输入的变数定期检查。该循环项目的启动是采用扫描输入系统和存储器在内存中的固定位置(输入图像存储器),梯形图程序之后执行响应,扫描程序,解决逻辑梯级确定的输出状态,更新后的输出状态存储在固定的内存位置(输出图像存储器)。程序扫描的最后,内存中保存的输出值被用来设置和重置PLC的物理输出。
我们都知道,逻辑控制是PLC的显着特征,它可以用来有效地处理模拟数据。
1)模拟数据采集和转换模拟量的输入输出,如压力、温度需要实时测量,例如温度首先由铂金电阻获取,然后信号转换模块将其转换为1-5V的电压信号,这个转换模块的输出最终被采集并传输到上述PLC中。
2)PLC控制算法模拟变量可以是任何一种变量,如我们这个绕组系统中的温度和压力。事实上,有自动和手动两种控制模式。手动模式下,操作人员根据所需水平修改输出值;而自动模式下,输出值根据预先设计的控制算法给出。值得一提的是,PLC的输出总是增量值,虽然自整定PID控制器可以满足要求,但是手动调谐总是用来初始化常规生产,并经该系统切换到自动模式;我们强调,用户的经验型模糊逻辑控制,用来改善生产状况也是适用的。薄膜张力控制系统采用PLC的模糊逻辑控制器(PLC),以克服绕组系统的不确定性。模糊逻辑算法已经由基本的PLC控制器实现。
对于固定的模式和常规PID的参数处理已经达到了一个很好的阶段,但是稳定是相对的,绕组系统的参数在一定范围内波动,因此控制器必须具有鲁棒性,以获得较高的性能。为了这个目的,模糊推理用于适应PID控制,通过这种办法,PID因素就能根据系统状态和电厂参数得到调整。
3)伺服电机控制一开始薄膜以低速传输,然后伺服电机被加速到设定的约每秒8米的高速绕速,传感器检测薄膜张力并控制伺服电机速度以保持恒定的张力。对控制目标不仅要保持薄膜张力不变,而且同时卷绕速度也要在最短时间内达到设定值。因此,最主要的问题是如何控制伺服电机的精确。
相关文章

发表评论